


飞行器制导控制半实物系统采样步长的优化设计
摘 要: 基于无人机制导控制一体化和实时仿真技术, 设计了一种新的包括惯性导航系统、GPS 系统、三轴转台、仿真计算机和显示监控系统等的半实物仿真系统. 该系统运用仿真计算机采集导航控制一体计算机的输出信号, 进行无人机运动学、动力学模型实时解算, 并将姿态信息传输给三轴转台; 三轴转台和惯性测量装置完成无人机航向、姿态等模拟; 导航和控制计算机运用导航信息生成控制指令, 传输到仿真计算机.试验结果表明: 惯性导航算法设计合理, 仿真步长1 ms, 控制信号误差小于1%, 该系统可以实现微型化,模块化, 改进后可应用到无人机的制导和控制系统中.
关键词: 半实物仿真; 无人机; 飞控系统; 组合导航; GPS 系统
无人机自飞行控制系统是一种具有自主导航、自动飞行控制、任务管理能力的综合系统[ 1] . 将该系统引入具有很高置信度的半实物仿真系统中,半实物仿真体系结构能够满足无人机制导控制的高精度和强实时性要求, 为系统的方案论证以及性能评估提供可靠的鉴定手段.
……
3 半实物仿真系统设计
半实物仿真又称为硬件在回路仿真, 在条件允许的情况下尽可能在仿真系统中接入实物. 半实物仿真填补了全数字/ 混合仿真与实际外场试验之间的空档. 本系统的半实物仿真系统组成如图5 所示.
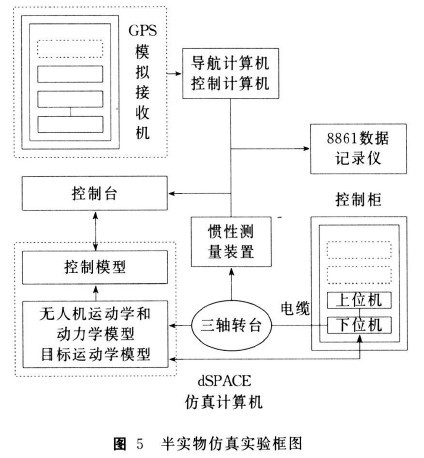
半实物仿真系统由dSPACE 仿真机, 捷联惯导系统, 角运动模拟器( 三轴转台) , 控制台, 导航和控制一体计算机, GPS 模拟接收机, 8861 数据记录仪组成.
仿真计算机采用德国dSPACE 仿真机, 主要完成无人机的动力学和运动学模型解算和仿真结果显示界面设计, 并通过I/ O 接口和各种板卡与各种仿真设备连接; 高性能仿真转台是一种集光机电和计算机控制技术为一体的三自由度运动设备,是半实物仿真系统的核心设备之一, 三轴转台在半实物仿真系统中用来模拟研究对象的俯仰、偏航和滚转运动; GPS 模拟接收机完成卫星导航系统模拟, 包括卫星星历和GPS 接收机功能模拟[ 13] ;IMU ( Inert ial Measurement Unit ) 惯性测量单元固定安装在三轴台上, 使得角速率陀螺和加速度计测量到真实数据, 输出惯性测量数据; 导航和控制计算机进行组合导航算法计算和控制系统解算,控制执行机构[ 14] .
半实物仿真系统工作流程为: 仿真计算机采集导航控制一体计算机的输出信号, 进行无人机运动学、动力学模型实时解算, 并将姿态信息传输给三轴转台; 三轴转台和惯性测量装置完成无人机航向、姿态等模拟; 导航和控制计算机接收GPS 模拟接收机信息[ 15] 、惯性测量装置的信息, 根据组合导航算法解算导航信息、控制系统得到导航信息, 按照控制规律, 得到控制信号[ 16] , 并将控制信号传回仿真计算机, 进行下一轮的计算[ 17] .
4 仿真试验及总结
……

