


一个实用的基于HLA的空管仿真系统设计
在民航系统中,空中管制方法对其运输效率具有极大影响。在新的管制方法投入使用前都必须对其进行模拟仿真,以检测其效率和安全性能。本文介绍了一个基于HLA,用于验证空管算法性能的仿真框架;并着重讨论了该仿真系统中的若干关键技术。实验结果表明该系统在4D航迹优化算法验证上取得了很好的效果,能够满足空管仿真验证技术的要求。
1引言
空管仿真系统就是借助虚拟现实技术,系统仿真技术等来逼真的再现空中交通管制的实际工作状态。通常空管系统中的新概念,新技术和新的运行模式的研究与应用都必须通过预先建立仿真环境来进行仿真、测试、验证和评估,从而调整或确认新概念和运行模式的发展路线和方向,因此空管仿真验证已经成为空管系统中重要的一环。而且空管系统对优化方法验证的需求已经从单一的技术实验验证扩展到全尺寸门到门的运行仿真验证,随之而来的对仿真技术的要求也从单机仿真过渡到分布式系统仿真。而网络技术、图形处理技术的不断发展,使得建立基于PC机群的基于高层体系结构标准的分布式空管仿真验证系统成为可能。
2仿真系统结构设计
2.1系统功能分析
基于4D航迹的优化是建立空管自动化系统的关键技术,通常在空管系统中管制区域被划分为塔台席位,进近席位,区管席位等不同管制区域,目标飞行器在这些区域对应着不同的飞行规则。对于仿真系统来说,其关注的任务主要是模拟基于新的航迹优化的自动指挥流程,检测飞行器在相应管制扇区的安全性和效率,验证优化方法是否出现飞行冲突等。空管仿真的任务主要包括相关空间信息的收集(主要是指仿真的气象条件、时间、管制规则、希望仿真的航班的数量,仿真所分配的停机位数量等),自动管制方法的生成(即生成所有航班达到关键点的时刻和位置数据),管制单元数据的接收(即从算法优化模块接受其所对应区域的航班数据信息),航班运动的仿真(逼真模拟出运动实体的各种运动状态信息)等几类元素。为了便于分析和验证仿真航班各个不同区域是否符合相应的运行规则,同时便于管制算法设计者进一步改进优化算法,采用三维视景仿真用作仿真结果的可视表达方法,这样便于更加直观地分析管制方法,有利于更进一步改进优化策略。在本文的空管仿真系统主要实现以下功能:
*航班优化。对任意时间段的航班飞行路径进行优化,生成4D航迹。
*可视化。包括二维态势和三维可视化。从塔台、进近、区管和全局等多个视角,动态地显示航班信息。
*4D航迹优化方法的仿真验证。用来对这些方法进行验证,以检测它们的有效性,各个部分资源是否能够最大限度的利用(比如停机位的资源分配情况,大尺度态势中航线上的繁忙情况),检测优化算法是否发生飞行冲突和冲突类型,同时根据仿真效果和评估系统的数据来修改原有的航迹优化算法,
*机场结构的仿真验证。在新的停机坪投入使用前,通过仿真系统来检测跑道、滑行道,停机场等的布局对于引导控制效率的影响。
2.2系统软件模块组成
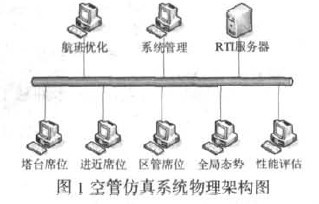
作为一个基于分布式仿真验证系统,为了追求较高的性价比,采用基于PC的网络来搭建该平台,按照HLA高层体系结构标准来构建空管仿真系统。仿真的联邦成员通过RTI进行交互。如图1所示,系统包括以下联邦成员:
*航班优化:实现空管优化算法,为各席位可视化和算法性
能评估提供航迹数据;
*系统管理:联邦的集中管理、配置和监控;
*RTI服务器;
*塔台席位:从塔台的视角观察航班运行情况;
*进近席位:从进近的视角观察航班运行情况;
*区管席位:从区管的视角观察航班运行情况;
*全局态势:全国各地航路运行数据的全局态势浏览。
*性能评估:空管优化算法的评估。系统采用模块化的设计方案,系统软件模块主要由可视化模块,RTI通信模块,航班优化仿真模块,数据分析评估模块组成。各联邦成员按照其功能,集成所需的模块。
*可视化模块
仿真可视化模块主要负责空管系统的3D和2D的可视化。三维可视化子模块根据场景的输入信息,加载场景的三维模型,并根据飞行器的运行状态在相应位置显示场景内的可视航班,通过对航班进行监控,找出仿真优化算法中出现航班发生冲突的地点。基于GIS的二维态势图则主要显示航班在航路的飞行信息,从而检测出全局航路的繁忙地点和改进方法尽量使资源分布均匀。通过建立三维机场场面和二维航路态势图的可视分析子系统,将有利于算法设计人员分析算法缺陷,更好的改进和提出空管管制优化算法。
*RTI通信模块
实现各联邦成员之间的交互。航班优化联邦成员在接收到控制员的命令信息后,将根据输入条件计算各航班的运动状态,实时将航班信息发给相应联邦成员。由于航班信息实时传输所需的带宽较大,为了减少网络数据流量,RTI通信模块实现了数据压缩和解压缩功能。
*航班优化仿真模块
实现空管优化算法,对任意时间段的航班飞行路径进行优化。通过输入仿真时间段,航路飞行规则,大气环境信息,优化出该时间段各航班的4D航迹以及在机场的滑行路径,并以关键点的形式表示。
*数据分析评估模块
该模块用于评估航班优化算法。检测飞行冲突;统计各关键点的流量;统计机场跑道、滑行道、停机坪等资源的利用情况。
3关键技术
3.1路径规划
航班在起飞前,要从机坪经过指定的滑行道驶向跑道;降落后,要从跑道经过指定的滑行道驶向机坪。在航班优化仿真模块中,路径规划的任务就是把路径上的机坪编号、滑行道编号和跑道编号的序列转化成一条连续曲线,并用一系列关键点描述。路径规划生成的4D航迹是检测航班之间是否发生冲突的前提。我们把机坪、滑行道、跑道统一作为道路处理,设计了一种数据结构。这个数据结构包含一个关键点数组和一个邻接表。关键点主要是该道路和其他道路的交点;另外,在存在弯道的情况下,弯道用折线逼近,折线的各个端点也存入关键点数组。各关键点按照空间关系排列。邻接表存储相通的道路编号及其对
应的关键点在两条道路中的序号。
算法的执行过程是反复地通过道路编号查找关键点序号,再由关键点序号查找出坐标值。例如求从道路A的第i个关键点到道路B的路径:首先用道路A的邻接表找出A与B的交点在两条道路上地序号;假设该交点在A上的序号为j,在B上的序号为k,那么A上从i到j之间的全部关键点都加入所求的路
径,此后新的路径端点变成道路B上的第k点。
3.2 HLA/FOM建模
-
文件大小: 70.0KB

